
Accessible Hospital Bed-Back Angle Controller
Project Overview
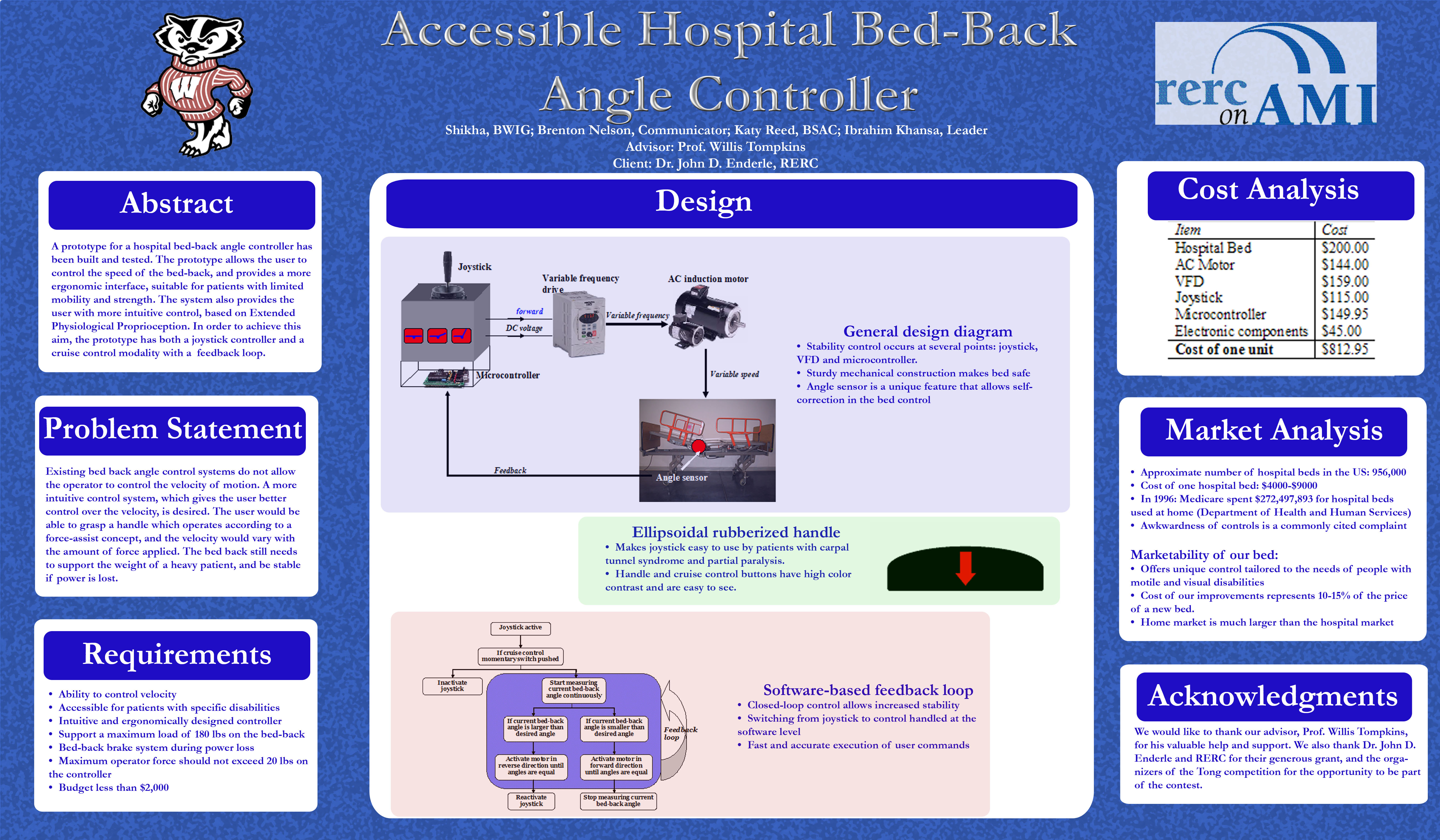
Existing bed back angle control systems do not allow the operator to control the velocity of motion. A more intuitive control system, which give the user better control over the velocity, is desired. The user would be able to grasp a handle which operates according to a force-assist concept, and the velocity would vary with the amount of force applied. The bed back still needs to support the weight of a heavy patient, and be stable if power is lost
Files
- Mid-Semester Presentation (March 8, 2007)
- Final Poster Presentation (May 8, 2007)
- FInal Report (May 9, 2007)
{kind=link}
Contact Information
Team Members
- Ibrahim Khansa - Team Leader
- Brenton Nelson - Communicator
- Katy Reed - BSAC
- Shikha A - BWIG
Advisor and Client
- Dr. Willis Tompkins - Advisor
- John Enderle - Client
Related Projects
- Spring 2007: Accessible Hospital Bed-Back Angle Controller
- Fall 2006: National Design Competition: Accessible power-assist hospital bed back angle controller